一、本周澜湄职业教育培训中心项目建设及相关事宜总结:
2月18日,上午,张链、张龙、张新江、高源四名老师共同召开本周培训工作会。会上老师们总结了上周工作内容并汇报了本周工作计划。机械专业方向张龙老师介绍上周完成了常用机械测量工具和机加工专用工具的培训和操作使用、机床空机测试、冷却液配比、CAM编程等工作,本周计划加工斯特林发动机的底座和部分工件等。机电一体化专业方向张链和张新江老师介绍上周完成了电子秤测试与应用的培训、综合报警系统测试与应用控制单元的培训、三相桥式全控整流电路的测试与应用进行培训、三相交流调压电路的测试与应用的培训等工作,本周计划进行直流调速系统的测试与应用、交流调速系统的测试与应用、PLC高级模块培训等。通信专业方向高源老师介绍上周完成了电脑鼠走迷宫国际标准的比赛规则以及电脑鼠的基本运行原理的培训、电脑鼠程序开发环境的安装配置培训、电脑鼠CPU对电脑鼠电机的控制原理和编码实现的方法培训、光纤熔接机的使用方法的培训,本周计划进行电脑鼠搜索算法、传感器控制算法等培训。大家对培训工作中出现的问题及解决方案进行了讨论。



随后,四名教师按照专业方向与柬方教师对接本周工作计划。并商议暑期的澜湄五国师资技术技能培训计划,希望本周共同商议。
2月22-24日,柬埔寨国立理工学院(NPIC)邀请我校张链、张龙、张新江、高源四名专业教师赴吴哥国立理工学院(NPIA)参观、考察并交流机械加工技术、机电一体化技术、通信技术专业建设情况 。


我方四名教师与吴哥国立理工学院(NPIA)副校长MOEUN THANAK及专业教师、柬埔寨国立理工学院(NPIC)教师代表深入交流。
首先,吴哥国立理工学院(NPIA)副校长MOEUN THANAK热烈欢迎我校四名专业教师与柬埔寨国立理工学院(NPIC)教师代表的到访。随后,吴哥国立理工学院(NPIA)副校长MOEUN THANAK介绍吴哥国立理工学院(NPIA)基本情况。吴哥国立理工学院(NPIA)始建于1992年,学历教育与非学历教育并举,共有中职教育、高职教育和本科教育三个层次。学校坐落于暹粒市郊区,距离暹粒市中心约半小时行程。全校共有教师近40名、学生300名。全校共有9个高职专业(包括:电气工程专业、电子专业、IT技术专业、机械专业、土木专业、建筑专业、化工专业、空调专业、英语专业),其中前四个专业与坐落于柬埔寨国立理工学院(NPIC)的澜湄职业教育培训中心暨柬埔寨鲁班工坊机电一体化技术专业和通信技术专业方向相近。同时,吴哥国立理工学院(NPIA)副校长MOEUN THANAK介绍到吴哥国立理工学院(NPIA)新校区将于2021年建成。希望能与天津中德应用技术大学、柬埔寨国立理工学院(NPIC)深度合作,共享澜湄职业教育培训中心暨柬埔寨鲁班工坊的平台,希望该校学生能到柬埔寨国立理工学院(NPIC)深入学习。


张链老师随后介绍了天津中德应用技术大学基本情况。天津中德应用技术大学是中国第一所公办本科层次应用技术大学,始建于1985年,是天津市委市政府确立的一流应用技术大学建设单位,是国家示范性高等职业院校,是中国政府与德国、日本、西班牙三国政府在职业教育和培训领域最大的合作项目,被业界誉为引进德国“双元制”第一校。学校拥有校企共建教学做一体化的实验实训场所259个,仪器设备两万余台套,多为德国、瑞士、西班牙等国家的先进生产型设备,价值4亿元人民币。学校拥有先进制造技术、自动化技术、航空航天技术与服务、交通技术与服务、软件与通信技术、新能源、经贸管理、文化创意与技术、应用语言等9大专业组群,2个中职专业、33个高职专业、14个本科专业、2个硕士点建设专业。
张链老师同时介绍到2013年习近平总书记提出“一带一路”重大倡议,2016年3月23日,李克强总理在海南省三亚市主持召开“澜沧江湄公河”合作首次领导人会议,会议确定在湄公河国家设立职业教育培训中心。项目由外交部、教育部、天津市人民政府落实,天津市人民政府确定天津中德应用技术大学负责项目建设任务。与此同时,鲁班工坊是天津市教委依据教育部与天津市共建《国家现代职业教育创新改革示范区》的协议要求,提出的一个旨在助力天津职业教育走出去,服务企业走出去的创新型国际化职业教育服务项目。天津已经先后在泰国、英国、印度、印度尼西亚建设了四个鲁班工坊,学校将建设天津职业教育的第五个鲁班工坊—柬埔寨鲁班工坊。
澜湄职业教育培训中心暨柬埔寨鲁班工坊总建筑面积6814平方米,涉及机电一体化技术和通信技术两个专业,机械加工技术、机电一体化技术、通信技术三个专业领域。初期总投资200多万美元,18间实训室,1600多台(套)实验实训设备。实验实训设备具有职业性、系统性、综合性、先进性、趣味性。同时,为了更方便学生使用,我们开发了对应的英文版实验实训教材。预计未来还会继续开设其他不同领域的专业,实现学历教育与非学历教育。最终,用五年左右时间将澜湄职业教育培训中心暨柬埔寨鲁班工坊打造成“立足柬埔寨、服务澜湄五国、辐射东盟十国,集职业教育、职业培训、科学研究、文化传承、创新创业五位一体按照市场化运作的国际化职业教育中心”。
张龙老师介绍澜湄职业教育培训中心暨柬埔寨鲁班工坊机械加工技术专业方向具有机加工(车工)实训室、机加工(铣工)实训室、钳工实训室和数控实训车间。包括6套普通车床、6套普通铣床、6套钳工实训设备、2套数控车床和1套数控加工中心,可满足车工、铣工、钳工、数控加工中心操作工等职业工种的技术技能培训,也可承担学历教育。
张新江老师介绍澜湄职业教育培训中心暨柬埔寨鲁班工坊机电一体化技术专业方向具有智能创客训练竞赛区、PLC与传感器应用技术实训室、电力电子与电气传动技术实训室、电气控制技术实训室、电工电子技术实训室和液压与气动技术实训室。所有设备均来自亚龙公司,包括电气控制、电子技术、PLC技术、传感器技术、电力电子技术、液压与气动技术实验实训设备。实验实训设备涉及全部教学和培训环节,能完成电工工种
高源老师介绍澜湄职业教育培训中心暨柬埔寨鲁班工坊通信技术专业方向具有通信技术体验厅,通信工程实训室,LTE系统实训室,网络优化实训室,多功能网络教室。所有设备来自大唐移动通信公司。能完成4G通信网络管理员技术技能培训,也可承担学历教育。
最后,我校四名专业教师、吴哥国立理工学院(NPIA)副校长MOEUN THANAK及专业教师、柬埔寨国立理工学院(NPIC)教师代表共同参观教学场所并交流专业技术。







二、本周技术技能培训工作总结:
1.机械加工技术技能培训(培训教师:张龙):
2月18日上午,张龙老师与柬方2名机械专业老师Pisey和SeangHey,按照斯特林规划斯特林发动机加工工艺,并对多零件体进行了分工。张龙老师首先根据柬方两名老师的特长,将一些简单的基础零件毛坯交给他们进行加工制作,在制作过程中讲解了切削用量的选择,根据图纸加工到设计参数的方法。


下午,在张龙老师的带领下,柬方两名教师Pisey和SeangHey顺利完成了毛坯零件的加工。首先让Pisey利用普通车床完成轴类零件的初始加工,在加工工程中,Pisey加工比较快,针对这个讲解了安全注意事项,以及如何面对学生教学需要解释的安全注意事项等。然后让SeangHey利用数控机床完成毛坯件内部型腔的加工,讲解了切削参数的选取,编程的工艺要求,刀具的选择,除此之外还介绍了一些专用夹具的设计和制作等内容。

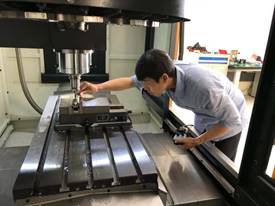
2月19日,在数控加工实训室进行利用百分表找正轴类零件的坐标系原点的操作方法。上午,机械专业张龙老师首先向柬方两名机械专业教师介绍了百分表的工作原理,百分表的量程,磁力表座的锁定方法,如何吸附主轴进行测量的方法,百分表在机床主轴上找正轴类零件。SeangHey教师通过张龙老师的演示,能够自主进行轴类零件的X、Y方向的工件坐标系找正工作。

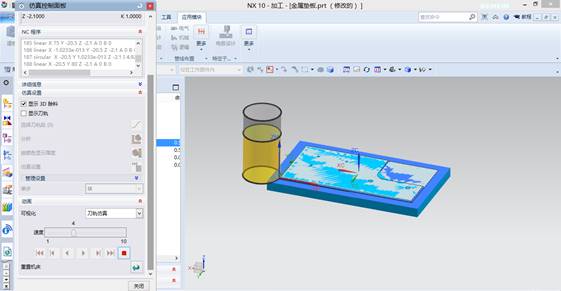
下午,SeangHey教师在张龙老师的带领下,进行了斯特林发动机轮子在机床夹具上的找正,并根据设计图纸进行了编程,在数控编程区,确定轮子编程程序,利用CAM软件进行了模拟仿真,并进行了车轮的初始加工。

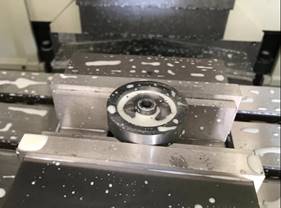
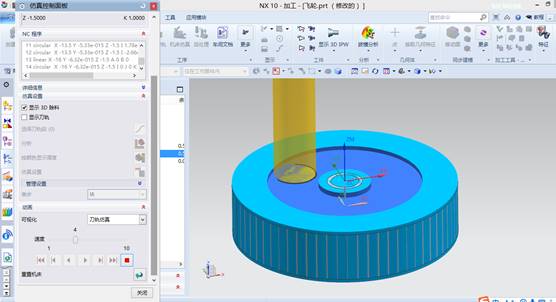
2月20日,张龙老师继续带领柬方教师完成斯特林发动机车轮的制作。早上,在张龙带领之下,完成了车轮的单面加工。期间,张龙老师向柬方教师仔细讲解了加工中注意事项,比如不同材质的切削刀具选用的切削参数不同,被加工的材料不同,也会影响到选用的切削参数。机床在加工过程中如何避免切削共振的方方,通过改变进给速度和主轴转速可以有效的避免切削共振。


下午,柬方教师根据中方教师的要求,自己进行了另外一侧的加工。由于柬方教师在装夹刀具的时候没有夹紧刀具,在进行另外一侧加工时,一直发现无法将工件尺寸加工到位,柬方教师向张龙老师询问故障,张龙老师带领柬方教师首先从加工程序上进行寻找原因,通过模拟仿真测试,发现程序没有问题,然后检查机床对刀参数是否争取,通过检查也没有发现问题,因此在执行一遍程序,发现刀具自己向上移动,最终确定了加工不到位的原因。通过寻求加工尺寸不到位的寻找过程,柬方两名教师对于数控加工过程中的各种因素的参与有了更加清醒的认识,对于以后自己进行加工排除故障等有很大的帮助。通过最终的加工,完成了斯特林发动机的车轮制作。


2月21日,在数控加工实训室进行斯特林发动机气缸的加工。上午,张龙老师带领柬方教师在数控编程区进行数控加工程序的编程,主要讲解了数控加工中钻削程序的编写,因为加工的材料是钢性工件,因此对于切削参数的选择比较重视,特别是气缸中比较小的气孔,选择的是3mm的麻花钻,并且孔加工尺寸比较长,对于切削参数要求比较高。针对柬方教师讲解了普通钻削指令G81和啄式钻孔G83的区别,并进行了模拟仿真。
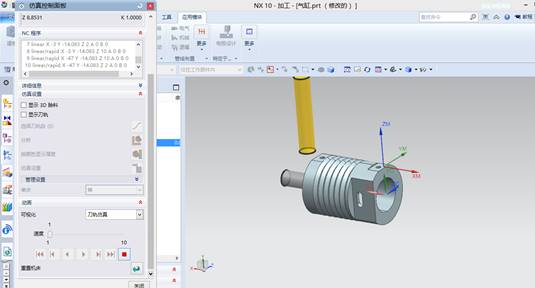
下午,柬方教师在张龙老师的带领下进行了数控加工,张龙老师首先讲解了塞尺进行Z向工件坐标系的建立方法,柬方教师按照中方教师的要求能够独立进行塞尺的使用。通过中柬双方教师的共同努力,一起完成了斯特林发动机气缸的加工制作。
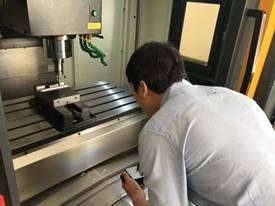
2月22日,上午,张龙老师带领柬方教师进行了斯特林发动机底座的材料切割,利用锯床完成了底座钢性材料的切割,但是材料的边锋比较粗糙,非常不利于加工,因此需要将其放到加工中心上进行进一步的深度加工,通过手工编程加工,最终将工件加工到尺寸要求。

下午,张龙老师带领柬方教师完成了斯特林发动机底座的数控编程工作,对于工件倒角加工进行了多种加工手段的介绍和讲解,最终完成了数控程序的编写。
2.电工技术技能培训(培训教师:张链、张新江):
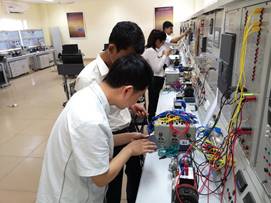
2月18日,开始第二周的培训工作,上午组织了集体会议,下午开始组织柬埔寨四位教师在电力电子和电气传动实训室进行电气传动实验实训设备的培训。四位柬埔寨教师全部到岗,首先进行实验设备的清洁和整理,准备实验材料。本次培训的模块是直流调速系统的测试与应用,主要完成直流全数字调速装置(6RA80)的接线和参数设置,直流调速系统的速度控制及动态参数设定。培训任务在操作进行中完成,由于本次线路的连接线路复杂,柬埔寨教师对于线路的理解出现了一些问题,我们对实训内容进行了详细的分析和讲解,在关键环节上进行了特殊标记。四位教师顺利完成本次实训任务。

2月19日,在电力电子和电气传动技术实训室进行交流调速系统的测试与应用培训。培训开始前,介绍MM440变频器基本参数的输入方法,MM440变频器输入端子的操作控制方式。准备西门子MM440变频器一台、三相异步电动机一台、断路器一个、熔断器三个、自锁按钮二个、导线若干、通用电工工具一套等。线路连接检测后,指导柬埔寨教师操作用自锁按钮SB1和SB2,观察外部线路控制MM440变频器的运行,最终实现电动机正转和反转控制。讲解其中端口“5”(DIN1)设为正转控制,端口“6”(DIN1)设为反转控制,对应的功能分别由P0701和P0702的参数值设置。晚上进行培训教材的编写工作。


2月20日,在电力电子和电气传动技术实训室进行培训。上午,组织柬方教师共同把所有实训台上的设备进行清洁和擦拭,防止设备的损坏。然后组织柬埔寨老师进行培训。一位柬埔寨教师对电机不太理解,张链老师详细解释实验实训中使用的电动机的情况。有直流他励电动机、交流鼠笼式异步电动机等。电机配件包括测功机、旋转编码器、抱闸装置、导轨等组成。直流电动机的主要参数:额定电枢电流1.25A、额定电枢电压110V,额定励磁电流0.17A,额定励磁电压110V,功率:120W,额定转速1000r/m。
下午,进行6RA70直流调速器通过Profibus-DP与PLC通讯培训并使用触摸屏控制直流电机的运动。使用软件SetpV5.3(测试版本),PLC的Profibus-DP通讯口,313C-DP直流调速器一台(带有通讯模版),电缆一Profibus-DP电缆,电缆二CP5611卡+MPI电缆等软件与设备进行系统培训。在完成本次实训任务后,为学员进行维修电工考核装置的检测和维护,特别提示他们在使用维修电工考核装置的时候,注意挂板的通信模块的转换。晚上回宿舍后,进行教材的编写与工作总结。








2月21日,在PLC与传感器技术实训室进行培训,培训内容为水塔水位自动控制系统的检修与应用。在实操前让柬方教师先行了解水塔水位自动控制的工作原理;理解使用水塔水位自动控制梯形指令编程的方法;理解用梯形图编程的方法和了解指令程序编法;掌握I/O分配;掌握编程器的基本操作以及编程器的输入、检查、修改和运行操作。实操中,提示他们根据水塔水位自动控制的原理图及I/O接线图进行接线;最终,掌握水塔水位自动控制的使用和调试方法并熟练使用编程软件进行基本逻辑指令编程。在设备的使用上,我们也对柬方教师进行安全规范提示。



2月22日,在PLC与传感器技术实训室进行三层电梯控制系统的检修与应用培训。上午,根据现实中的电梯原理,我方教师运用一个模块的方式对现实中的电梯进行仿真。在控制要求上基本与实际工程保持一致。在电梯的外部可以对电梯进行呼叫,即电梯在本层时,呼叫直接开门,在其他层时运行到呼叫层再开门。在电梯内部也可以对电梯进行呼叫,即电梯无论在开门还是关门状态都可以选择要去的层数,关上门之后运行到指定层数。下午,我方教师指导柬方教师根据三层电梯的原理图绘制I/O接线图,按工艺要求完成电路的安装接线和调试,通过编写PLC程序实现三层电梯的控制。



3.通信技术技能培训(培训教师:高源):
2月18日,高源老师向柬方教师讲解了电脑鼠的眼睛——红外传感器的有关知识。MicroMouse-JZ 上共有4组红外线传感器,每组红外线传感器由红外线发射和红外线接收组成。MicroMouse-JZ 上的红外传感器是模拟输出,能够精确测距.其作用如下: 1.利用四组传感器检测一定范围内的障碍物,既可以判断一定距离的范围内是否存在障碍物,并且可准确测距。可用于电脑鼠运行过程中的迷宫格信息识别和转弯控制; 2.左右斜45度两侧的红外传感器能够判断障碍物的距离远近.既可以指示出无障碍 物、有障碍物和障碍物太近三种状态,又可以矫正车姿。
高源老师除了讲解红外传感器工作原理外还简单介绍了一下红外传感器的硬件电路结构。柬方老师认真做了笔记并书写了实训报告。


2月19日,高源老师给柬方的ChanThea老师讲解电脑鼠的基本控制流程,以及电机与红外传感器的配合方法,并手把手的教会了柬方教师编程控制电脑鼠向前直线运动和转弯的方法。控制虽然简单,却需要柬方教师掌握综合性的知识,编程、硬件工作原理、算法实现等等。当柬方教师实验成功时,禁不住惊喜的叫出了声音来。



2月20日,电脑鼠走迷宫的学习进入高难度阶段,高源老师给柬方的两位老师讲解了如何建立迷宫坐标和迷宫的绝对方向。迷宫是由 18cm*18cm 大小的方格组成的,其行列各有 16 个方格。为了让电脑鼠记住 所走过的各个迷宫格的信息,我们就要对这 256 个迷宫格进行编号。很明显,用坐标是非常方便的。同时,我们可以以电脑鼠放到起点时的方向为参照,此时电脑鼠的正前方为 Y 轴 正方向,后方为 Y 轴负方向,左方为 X 轴负方向,右方为 X 轴正方向。根据坐标的定义和比赛规则可以知道,电脑鼠的起点可能在(0,0)点,也可能在 (F,0)点。即终点可能在电脑鼠的右前方,也可能在电脑鼠的左前方。这个可以根据电 脑鼠第一次检测到的转弯口是在左方还是右方判断出来。同时,高源老师还要讲解如何用编程的方法实现以上算法。由于,柬方教师编程基础较为薄弱,这部分内容,学习困难。不过在高源老师的耐心讲解下,最终还是基本掌握了上述知识点和技能点。



2月21日,高源老师讲解电脑鼠的搜索算法及其编程实现。在没有预知迷宫路径的情况下,电脑鼠必须要先探索迷宫中的所有单元格,直到抵达终点为止。做这个处理的电脑鼠要随时知道自己的位置及姿势,同时要记录下所有访 问过的方块四周是否有墙壁。在搜索过程中,还要尽量避免重复搜索已经搜索过的地方。常用的搜索算法有:右手算法、左手算法、向心算法等。今天高源老师主要介绍了右手算法及其编程实现。该项内容较为抽象,高源老师采用了画图加现场演示的方法帮助柬方教师理解,采用画流程图加逐行讲解的方法讲解了算法的编程实现以及修改参数的位置。



2月22日,高源老师向柬方教师讲解了光缆终端盒的安装步骤流程,光缆终端和的识别与选用,以及光缆尾纤及耦合器的识别与选用等。这一部分是一些纯技能点,需要柬方教师多次练习才能掌握,相对来说讲解较为简单,但学习过程中需要使用到光缆剪钳、割刀等危险工具,在练习过程中高源老师多次强调了相关的安全操作方法。